 腸管型ポンプロボット「Zendo DriveⓇ」
腸管型ポンプロボット「Zendo DriveⓇ」
1台で高粘度流体・固液混合流体を
混ぜる、運ぶ
腸管型ポンプロボット
Zendo DriveⓇ
腸の蠕動から学んだ画期的デバイス
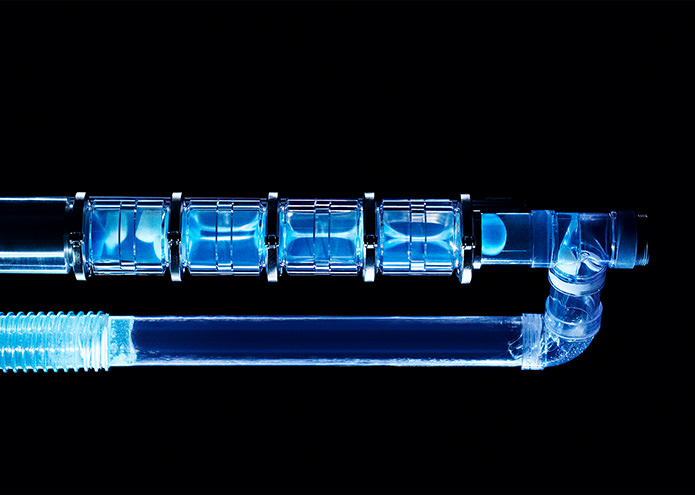
Zendo DriveⓇ
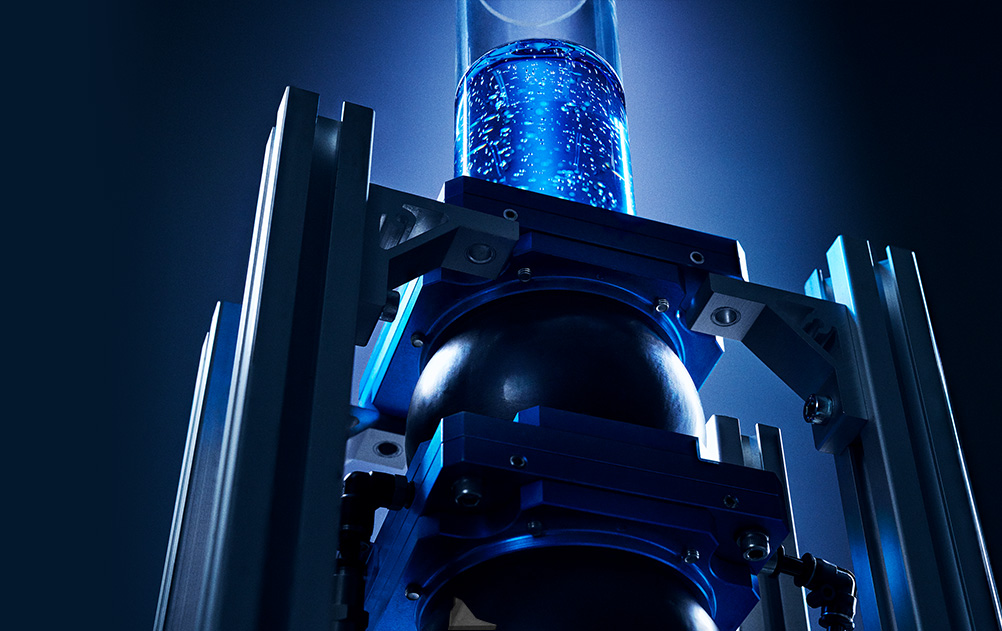
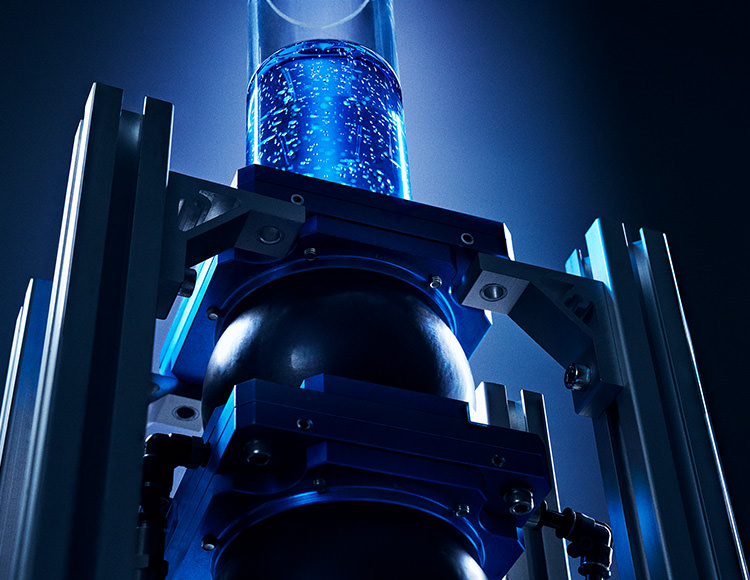
Zendo DriveⓇはパイプ全体が腸のように動くことで内容物を「運ぶ」ことや、「混ぜる」ことができるこれまでにないデバイスです。独自開発の人工筋肉と内ゴムチューブにより腸管の蠕動運動の機能を再現(※)することで、超高粘度流体・固液混合流体の混合および搬送を実現しています。
※株式会社LIXIL(旧株式会社INAX)と中央大学との共同研究による特許技術に基づく
こんなお悩みありませんか?
| 超高粘度流体の搬送を行いたい | デリケートな食材の搬送を行いたい |
| 土砂・スラリー等危険物の搬送を行いたい | 固液混合流体の楊重(上に運ぶ)搬送を行いたい |
| 配管のつまりを予防・解消したい | 低せん断での混錬・撹拌を行いたい |
そのお悩み、
ソラリスの腸管型ポンプで解決いたします!
様々な場所で応用可能です。カスタマイズも承りますのでお気軽にご相談ください。
SOLUTION
食品、土、中間材料などの高粘度
流体や固液混合流体の搬送
食品、化粧品等のデリケートな
材料の混錬・攪拌・搬送
さまざまな配管詰まりの
予防・解消
- ロケット固体推進薬の製造装置として
- 掘削土砂の楊重搬送装置として
- シールドマシンの排泥管詰まり解除装置として
- 食材搬送装置として
Feature製品特徴
-
01
内容物に優しい
- 低圧動作
- 容物に応じた運び方
- 加温、冷却機能 -
02
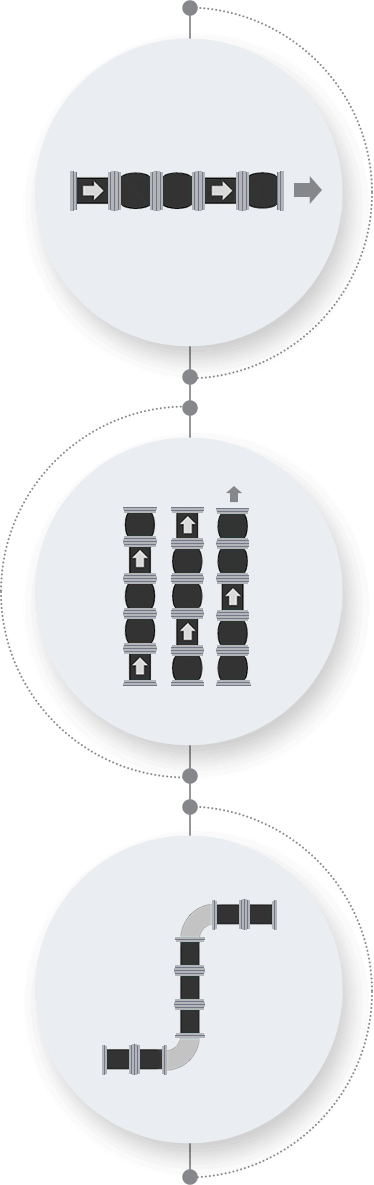
垂直にどこまでも
運べる- 垂直にどこまでも
- 固液 混合流体に対応
- 長距離搬送が得意 -
03
柔軟な運用可能
- レイアウト自由自在
- 安全な空気圧制御
- イージーメンテナンス
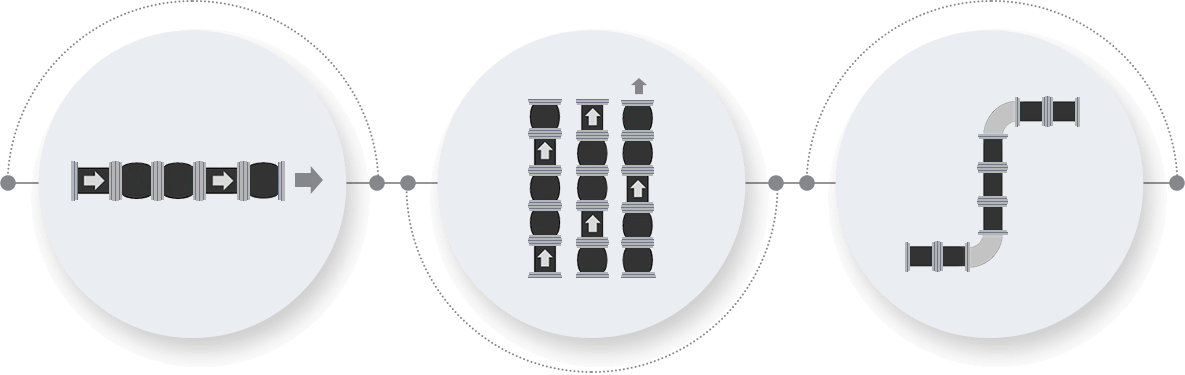
「運ぶ」「混ぜる」を実現するソフトロボット
従来の回転運動主体の混合・搬送装置では、混ぜれない、運べないを抜本的に改善します。
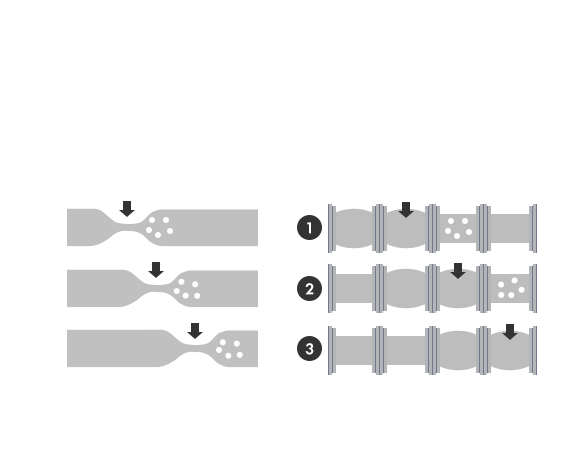
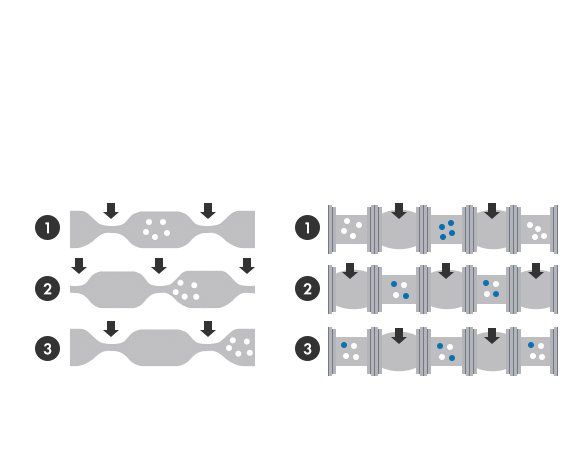
人間の腸管は蠕動運動により食塊を運搬しています。
また運動パターンを変化させることで 食塊を適度な柔らかさになるように混合しています。
腸管型ポンプロボットはこの動きを応用しています。
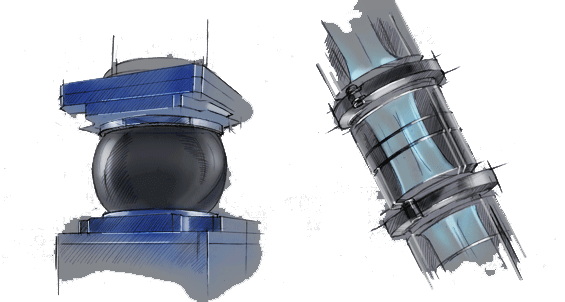
Convey&Mix
Peristalsis
蠕動運動とは人間の腸のように収縮と弛緩(しかん)を繰り返しながら
内容物を揉むように送り出す動きのことです。


Lineupラインナップ
-

2インチ腸管型ポンプ
|外側人工筋肉あり|内径2インチ(5cm)
1ユニット11cm、1.1kg流量はユニット数・容物により変化します。
詳細はお問い合わせください。 -

4インチ腸管型ポンプ
|外側人工筋肉あり|内径4インチ(10cm)
1ユニット22cm、5kg流量はユニット数・容物により変化します。
詳細はお問い合わせください。 -
2インチ腸管型パイプ
|外側人工筋肉なし|2インチ
サニタリー配管にダイレクト接続
Plan導入プラン
貴社の要件に合わせてロボットをカスタマイズし、
テスト搬送から運用までサポートするプランです。
既存ポンプで弊社ラボで試験
弊社が保有するポンプロボットにて、
貴社からお借りした材料で搬送・混錬を
実施
※詳細な物理量測定は実施せず、撮影した動画・
静止画よりご判断いただきます。
テスト搬送に向けて以下をヒアリングし、実施します
- ●最終的な要件の確認
- ●搬送する内容物の確認
- ●搬送する内容物を弊社にご送付
- ●弊社ラボ環境にて、搬送テスト
貴社要件に
あわせて
カスタマイズ
開発・
導入評価
貴社ラボで、実際の材料で搬送・混錬を実施。貴社要件を整理し、貴社要件を満たすロボットを開発
カスタマイズ開発・導入評価を繰り返し、以下のStepで評価します
- ●実際の材料で搬送・混錬を実施、物理量を計測し、要件を確認
試験には弊社も立ち合い、必要なデータを取得するまで複数回実施 - ●改善点を洗い出し、ロボット開発
本格導入支援
本格導入版のロボットを製造・販売
導入支援として、以下をサポート
- ●ミニマム導入(トライアル導入)
- ●本格展開
- ●アフターサポート