
腸管型ポンプロボット「Zendo Drive®」 :工事現場の土砂楊重
大深度下の土砂揚重を自動化による工数削減・コスト削減を目指す
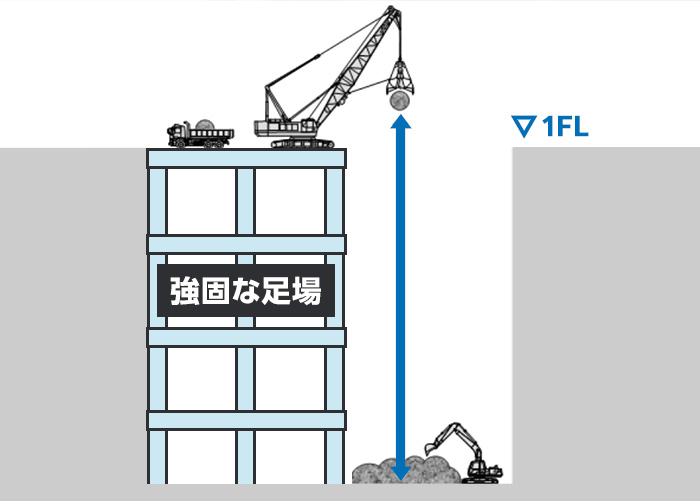
課題
- 従来デバイス(ロープ式クラムシェル)は、深度に比例して揚重効率が低下
- ロープ式クラムシェルにより空間が占有され他の施工が制限、工期が伸びる
- ロープ式クラムシェルは、熟練したオペレータの確保が必要
解決策
従来デバイス(ロープ式クラムシェル)を腸管型ポンプロボット「Zendo Drive®」で置き換えることで、工数削減・コスト削減の実現を目指す
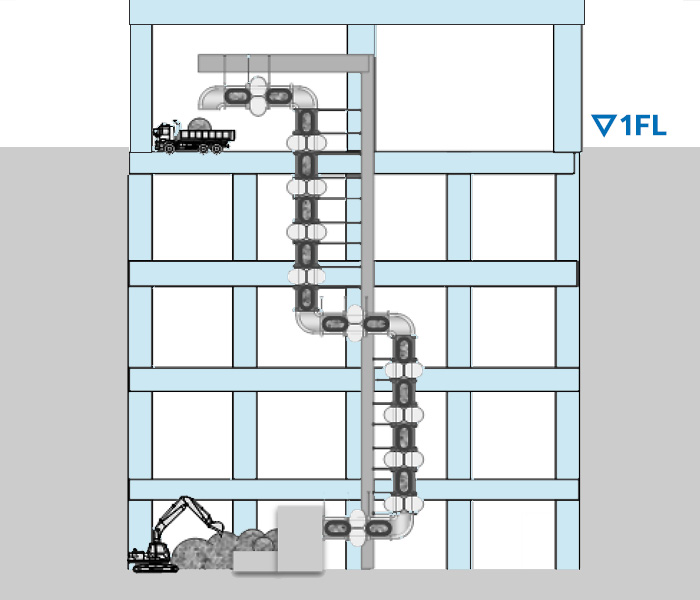
- 深度にかかわらず楊重することが可能
- 配管幅程度の空間専有であるため、並行して他の工事の施工が可能
- 腸管型ポンプロボット「Zendo Drive©」の導入により工事の自動化が可能であり、熟練のスキルは不要
上記と同様のケースとして、コンクリートの長距離搬送、大深度杭打ちの工期削減等に応用可能と想定